

واحد R&D سما آسانبر دانش بنیان
خلاصه:
در حال حاضر آسانسورها شامل اتاقک و وزنه تعادل متصل به انتهای یک کابل هستند که توسط چرخکها حرکت میکنند که دارای معایب بسیاری می باشند مانند استفاده از سیستم تعادل که فضای بیشتری را اشغال کرده که باعث میشود موتورها برای بالا و پایین بردن آسانسور قدرت بیشتری را مصرف کنند و همچنین نیاز به کنترلکنندههای سرعت و گردش (دور) موتور دارند. این نوع آسانسورها نیاز به اتاق ماشین (موتورخانه) دارند که موتورهای الکتریکی بزرگ و اتاقک کنترلکننده، ریز پردازنده الکترونیکی و رله مکانیکی در آنها قرار میگیرند. استفاده از طناب و قرقره موجب افزایش هزینه میشود و مقدار زیادی روغن به منظور روان کننده حرکت استفاده میشود. این پروژه باعث پیادهسازی جدیدی میشود که از آسانسور بدون کابل و موتور استفاده میکند. این پروژه بر اساس اصل الکترومغناطیسی قانون فارادی است که در آن آهنربای دائمی و الکترومغناطیسی نقش حیاتی دارند. با اصلاح مفهوم کنونی، ما میتوانیم مزایای استفاده از آن را داشته باشیم: انرژی مؤثر بیشتر از سایر آسانسورها؛ زیرا از توان زیادی استفاده نمیکند که توسط موتور مصرف میشود، روغن زیادی نیاز نیست و تابلو عملیات به نرمی عمل میکند. این نوع آسانسور به فضای کمتری نیاز دارد زیرا از موتورهای الکتریکی و اتاق کنترل (موتورخانه) برای بهرهبرداری استفاده نمیکند. همچنین وزنه تعادل استفاده نمیشود که هزینه کلی را کاهش میدهد. به موتورخانه نیازی نیست.
1- مقدمه:
در آسانسورهای معمولی، سیستمهای هدایت مکانیکی به صورت راههای لغزنده یا غلتکها استفاده میشوند. با این حال، در مقایسه با راه حلهای غیر رسمی الکترومغناطیسی چارچوب (اسکلت) معمولی دارای معایب بسیاری است از جمله: راندمان کم، ضعف بیشتر و نیاز به روان کاری مکرر و تعمیر و نگهداری منظم، نوسان و سر و صدا بیشتر اتاقک آسانسور. به طور خاص، مهم است که فاصله هوايي موتور خطي ثابت باشد که بر ميزان نيروي حرکتي تأثير ميگذارد؛ بنابراین، فناوریهای تعلیق مغناطیسی با محرک (فعالکننده) الکترومغناطیسی به منظور هدایت آسانسور برای جلوگیری از مشکلات ارتعاش و اختلالات اتاقک آسانسور بکار میرود. به این معناست که آسانسورهای معمولی با سیستمهای هدایت مکانیکی به علت نیازهای بسیار بالای این ساختمانها محدودیتهای کاربردی دارند. بهبود عملکرد عملیاتی چنین سیستمهای آسانسور با استفاده از هدایتگرهای الکترومغناطیسی بدون سایش و روان ساز به جای هدایتگرهای اسلاید یا غلتکی امکان پذیر است. این کار با پیشنهادهای مختلف برای هدایت الکترومغناطیسی سیستمهای حمل و نقل عمودی امکان پذیر است. این نیز پاسخ به تکنیک آسانسورهای بدون سیم بکسل به عنوان یک مثال کاربردی برای هدایتگرهای فعال مغناطیسی است.
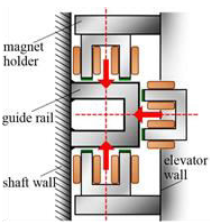
شکل 1: سیستم هدایت الکترومغناطیسی ترکیبی.
محرکهای الکترومغناطیسی ترکیبی در شکل 1 نشان داده شده است. در این شکل، الکترومغناطیس با آهنرباهای دائمی (PM) مجهز شده که یک مغناطیس با تنظیمات خاموش شدن را فراهم میکنند. به این الکترومغناطیسها میتوان به دو روش متفاوت تقریبی انرژی داده شوند. در این مقاله، این روشها به عنوان روشهای یک طرفه و دو طرفه کنترل، نامیده میشوند.
با توجه به قانون دوم نیوتن، معادله حرکت یک سیستم هدایت یک طرفه به صورت معادله (1) است.
که در آن ، ، ، و به ترتیب طول فاصله هوایی، مشتق دوم فاصله هوایی، نیروی الکترومغناطیسی، نیروی الکترومغناطیسی عملگر مخالف با جریان ثابت یا PM و نیروی اختلال خارجی را نشان میدهند. به دلیل اینکه مقاومت مغناطیسی بین ریلهای هدایتگر و الکترومغناطیس ناچیز است، بی اختیار جریان مغناطیسی تولید شده بین الکترومغناطیس و ریلهای هدایتگر بر روی شکاف هوایی بین آنها متمرکز میشود. بنابراين جریان مغناطیسی مؤثر شکاف هوايي به شرح زير است:
که در آن و به ترتیب ضریب تراوایی (نفوذ پذیری) خلأ و شکاف هوایی میباشند. در نتیجه نیروی کششی به صورت معادله (3) محاسبه میشود.
که در آن تعداد دورهای سیم پیچها و جریان تجهیزات هدایت تکی میباشند.
- انواع آسانسور
2.1 آسانسورهای هیدرولیک (آسانسورهای فشار)
آسانسورهای هیدرولیک توسط یک پیستون در پایین آسانسور پشتیبانی میشوند که آسانسور را بالا میبرند. آنها برای کاربردهای کم ارتفاع 2-8 طبقه استفاده میشوند و با سرعت حداکثر میتوانند حرکت کنند. اتاق ماشین برای آسانسور هیدرولیکی در پایینترین سطح مجاور شفت آسانسور واقع شده است.
2.2 آسانسورهای کششی (آسانسورهای کشش)
آسانسورهای کششی توسط طنابها بالا برده میشوند که به بیش از یک چرخ متصل به یک موتور الکتریکی بالای شفت آسانسور قرار میگیرند. آنها برای کاربردهای ارتفاع زیاد استفاده میشوند و سرعت حرکت بسیار بالاتری نسبت به آسانسورهای هیدرولیکی دارند. وزن تعادل، آسانسورها رو مؤثرتر مینمایند.
2.3 آسانسورهای کارگاهی
آسانسورهای کارگاهی، دستگاه موتور خود را بر روی خودشان، عمدتاً موتور الکتریکی یا موتور احتراق (سوخت)، نگه میدارند. آسانسورهای کارگاهی اغلب در مناطق کار و ساخت و ساز استفاده میشوند.
2.4 آسانسورهای بادی
آسانسورهای بادی با کنترل فشار هوا در یک محفظه که در آسانسور نشسته است، بالا و پایین میروند. با اصول ساده فیزیک، اختلاف فشار هوا در بالا و پایین اتاقک آسانسور خلأ، عیناً حمل اتاقک توسط هوا صورت میپذیرد. این پمپهای خلأ یا توربینها هستند که از طریق انتشار آهسته فشار هوا که به پایین اتاقک شناور است اتاقک را به طبقه بعدی میکشند. آنها به دلیل طراحی جمع و جور، به خصوص برای خانههای موجود ایده آل هستند زیرا به چاه آسانسور نیازی نیست.
- ساخت و ساز و عملکرد آسانسور بدون سیم بکسل، آسانسور الکترومغناطیسی
3.1 واحد کنترل
PIC18F4480 یک میکرو کنترلر 8 بیتی است و با فناوری نانو WATT پیاده سازی شده است، از این رو برای عملیات آن نیاز به قدرت بسیار کم دارد. همچنین دارای 16 بیت دستورالعمل تنظیم معماری (ISA) است که آزادی را برای برنامه نویسان با انواع دادههای مختلف ثبت، دستورالعمل، حافظه معماری، حالتهای آدرس، وقفه و عملیات IO فراهم میکند.
مشخصات حافظه و پایداری: PIC18F4480 دارای 256 بایت EEPROM (حافظه الکتریکی قابل خواندن فقط قابل پاک کردن و قابل برنامهریزی است)، 2 کیلو بایت SRAM (حافظه ثابت) و 32 کیلو بایت حافظه فلش است که در عوض درجه آزادی دیگری را برای برنامه نویسان ثابت میکند.
خود برنامهریزی:
این دستگاهها میتوانند با استفاده از کنترل نرمافزار داخلی، فضای حافظه برنامه خود را بنویسند. با استفاده از یک برنامه بارگذاری بوت در بلوک محافظ بوت در بالای حافظه برنامه، امکان ایجاد یک برنامه کاربردی وجود دارد که میتواند خود را در این زمینه به روز رسانی کند.
مجموعه دستورالعمل قابل تعمیم:
خانواده PIC18F4480 یک فرمت اختیاری را برای مجموعه دستورالعملPIC18 معرفی میکند که 8 دستورالعمل جدید و یک حالت Addressing را اضافه میکند. این برنامه افزودنی که به عنوان یک گزینه پیکربندی دستگاه فعال شده است، به طور خاص طراحی شده است تا به بهینهسازی دوباره باز پرداخته شود.
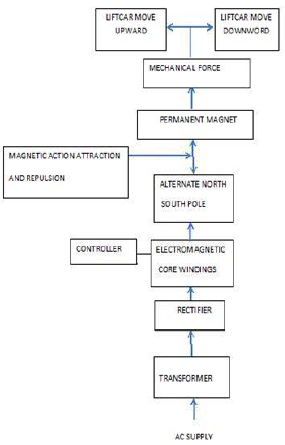
شکل 2: نمودار روند نما
کد برنامه توسط زبانهای سطح بالا، مانند C نیز توسعه داده شده است.
مدل پیشرفته CCP:
در حالت PWM، این ماژول خروجیهای مدولاسیون 1، 2 یا 4 را برای کنترل نیم پل و پل کامل فراهم میکند. ویژگیهای دیگر عبارتند از خاموش کردن خودکار، برای غیرفعال کردن خروجیهای PWM در وقفه یا سایر شرایط انتخاب و راه اندازی مجدد خودکار، برای فعالسازی مجدد خروجیها پس از اینکه وضعیت پاک شد.
آدرس دهی USART:
این ماژول ارتباطی سریالی قادر است از عملکرد استاندارد RS-232 پشتیبانی کند و پروتکل LIN / J2602 را پشتیبانی میکند. سایر پیشرفتها شامل تشخیص خودکار میزان سرعت و یک باند فرکانس 16 بیتی برای بهبود وضوح میباشد. هنگامی که میکرو کنترلر از بلوک نوسانگر داخلی استفاده میکند، EUSART عملیات پایدار را برای برنامههای کاربردی که امکان صحبت با دنیای خارج را بدون استفاده از یک کریستال بیرونی (یا نیاز مصرف انرژی آن) فراهم میکند.
مبدل 10 بایتی A/D:
این ماژول ترکیبی شامل زمان استفاده برنامهریزی شده است، اجازه میدهد که یک کانال انتخاب شود و یک تبدیل بدون منتظر شدن برای شروع یک دوره نمونه برداری آغاز شود و بنابراین کد بالاسری (overhead) کاهش میدهد.
تایمر نگهبان قابل تعمیم (WDT):
این نسخه پیشرفته 16 بیتی، اجازه میدهد تا محدوده زمانی وقفه از 4 میلی ثانیه به بیش از 131 ثانیه برسد که این در سراسر برنامه پیشرفته فلش پایدار است و 1 کیلو بایت حافظه دسترسی دوگانه برای USB برای میانگیری (buffering) استفاده میشود.
PIC18F4480 شامل 13 کانال (تا 13 کانال) برای مبدل آنالوگ به دیجیتال است. دقت مبدل 10 بیتی برای تبدیل آنالوگ به سیگنال دیجیتال نسبتاً متغیر است.
 3.2 مغناطیس دائمی
3.2 مغناطیس دائمی
نئودیمم آهن بور (NdFeB) نوع دیگری از مواد نادر مغناطیسی زمین است. این ماده خواص مشابه با ساماریم کبالت دارد به جز اینکه آن را به راحتی اکسید میکند و به طور کلی دمای مقاومت مشابهی ندارد. آهنرباهای NdFeB همچنین دارای بالاترین محصولات انرژی نزدیک به 50MGOe هستند. این مواد پر هزینه هستند و به طور کلی به علت هزینه بالا در برنامههای بسیار انتخابی (خاص) مورد استفاده قرار میگیرند. هزینه نیز توسط حقوق مالکیت فکری توسعه دهندگان این نوع آهنربا هدایت میشود. محصولات انرژی بالا خود را به طرحهای جمع و جور تبدیل میکنند که به برنامههای نوآورانه و هزینههای تولید پایینتر منجر میشود. آهنرباهای NdFeB بسیار خورنده هستند. درمان سطحی توسعه یافته است که به آنها اجازه میدهد تا در اکثر برنامههای کاربردی استفاده شوند. این درمانها شامل طلا، نیکل، روی و قلع و پوشش رزین اپوکسی است.
- نتیجه
هدف از پروژه ما این است که آسانسور الکترومغناطیسی بدون سیم بکسل بدون استفاده از موتور قدرت بالا، طناب و وزن تعادل ارائه شود. ما میتوانیم با استفاده از الكترومغناطیس به آسانسور بدون سیم بکسل دست یابیم و برای این نوع آسانسور یک محدوده وسیع وجود دارد.
منبع:
[1] Chaitali Mahale, Dr. V .G. Neve, Banasharifian, Ankita Borban, “A new Technique of Rope Free, Motor less Elevator using Electromagnetic Principle”,Imperial journal of Interdisciplinary Research, Vol-3, Issue-9, 2017.
گردآورنده: کارشناس ارشد فیزیک هستهای مهندس کامران کشیری





